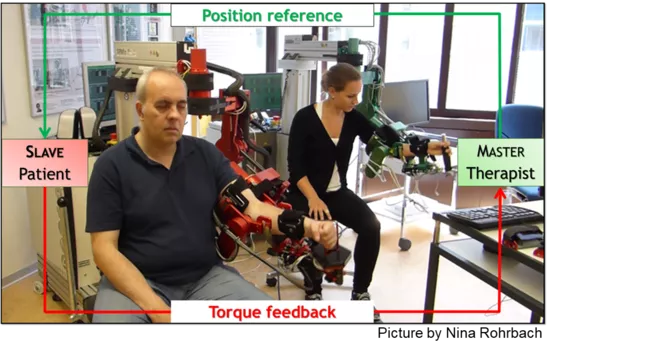
In collaboration with the Sensory-Motor-Systems Lab at the ETH Zürich (Prof. Dr. Robert Riener), the so-called "Beam-Me-In Strategy" was piloted by our colleague Nina Rohrbach during a six-month research stay. The basic idea of the "Beam-Me- In" concept is to supplement the advantages of conventional manual interactions with those of a robot assistants. In “Beam-Me-In” the robot enables the therapist to assess individual motor movements over a distance (telerehabilitation) and to target therapies specifically. For this purpose, two ARMin devices are connected to each other during the therapy whereby the system is technically based on the so-called master-slave concept. Our study aimed to test if patient behavior can be transmitted over exoskeleton rehabilitation robots to provide a “Beam-Me-In” experience to therapists. In order to evaluate how far therapists can experience the patient’s disability, we determined how accurately, reliably, and confidently therapists can quantify patient’s motor impairments by having their arm actively or passively moved through the patient’s trajectory and then estimating outcomes based on the therapist’s own proprioception and vision.